With progressing urbanisation and increasing availability of the cars and ride hailing services, inefficient parking has become a huge burden for drivers. Motorists on average spend 30% of their driving time in cities looking for free spaces and that causes much frustration and stress.
INRIX studied drivers’ parking behaviour in 30 cities in the UK, US, and Germany and estimated that the combined cost in wasted time, fuel, and carbon emissions to the economies of these countries amounted to $200 billion a year.
Just like digitisation for the roads and real-time traffic information has brought driving experiences to the next level, real-time parking availability information can improve motorists’ parking experience, transport operations efficiency and help us all breathe a little easier!
On parking operator side there is an even bigger scope for transformation. If we just look at the impact of Internet, mobile, real-time and big data on travel or transportation industries – the sheer scale of changes is simply astounding. Who would have thought that the biggest taxi operator in the world will own no cars? The world’s largest accommodation provider hosting 2 million people a day, sponsoring Olympic Games, will not own a single room. Both digital disruptors heavily relying on data and better user experiences did not even have 0.1% market share 10 years ago! Now, with the advent of smart parking IoT and AI-based solutions that can provide new vitally important real-time data, the selection of the best technology for your specific business requirements still remains a challenging task. Success stories are not always fully shared to maintain competitive edge, lessons learnt with suboptimal solutions often become reputationally or (in case of public sector) politically sensitive information.
The good news is that today’s choice of vehicle detection systems is extremely wide. But as it is often the case, the flip side of the broad choice is buyer’s confusion – how do I choose the best smart parking solution for my operations? This article will shed some light on a variety of technological approaches to solve the parking crunch and some particularly important nuances affecting vehicle detection sensors accuracy and performance.
Advantages and Disadvantages of Smart Car Parking Sensors
Let’s start with definitions. What is a smart parking system? The most conventional technical definition is that smart parking system is a system that collects and disseminates real-time parking space availability data. Of course such systems may incorporate different business logic and value added services that sometimes may have technical implications but we will start with getting the tech basics right.
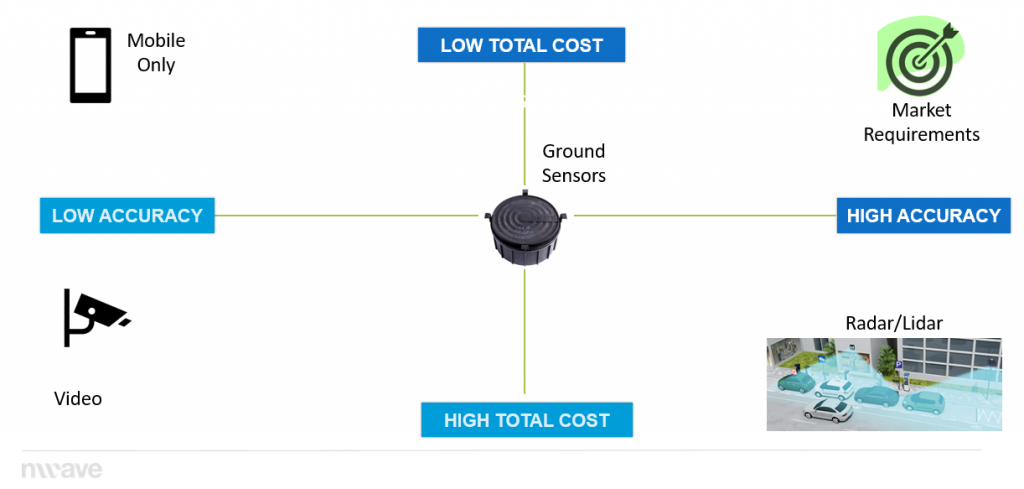
The today’s choice of technological tools to collect real-time parking availability data boils down to three broad categories of systems: (1)cameras, (2)overhead radars/lidars and (3)ground sensors.
Each of them has its own advantages and disadvantages and the choice of a particular smart car parking system depends on specific project requirements.
Cameras seem to be the most rational approach since it allows monitoring many parking spaces at once. Cameras show good results in test environments where computer vision models are trained for particular settings and vehicle types. However, real-world parking has a much greater variety of viewing angles, lighting conditions, and many other challenges.
Camera-based systems can be classified into two types:
- Cloud-based/server processing: videos or snapshots are streamed to the cloud or powerful on-premise server.
- On-board processing: the system recognizes vehicles locally and sends the parking events and images when required.
This solution brings high operating costs since the operator has to train the model for a particular setting. Putting all computer vision problems aside, one of the biggest real-life challenges for camera based solutions is to obtain reasonable quality and clarity pictures at all times and weather conditions. So camera-based solutions can work well in large open space lots like those in supermarkets or airports, well lit at evening time and preferably not much snow.
Overhead radars/lidars can detect the presence of a vehicle using radio signals and laser light reflections. The system provides accurate results within 7 metres but at a greater distance and sharper reflection angles its accuracy decreases, so, mains powered sensor fixed on a lamp post can reliably cover only 4-5 parking spots.
Ground sensors are considered to be a universal method to monitor the parking occupancy. Battery-powered wireless sensors are installed on each parking space and are not affected by line of sight interference. The proximity to the detected object lets ground sensors provide accurate results at a reasonable maintenance cost. Currently, ground sensors are considered the most flexible and efficient way to address parking problems.
Note: There were attempts to use mobile phones’ accelerometer IMU sensors to estimate parking occupancy however tests proved them to be ineffective.
Ground Vehicle Detection Sensor Mix
There are many types of ground vehicle detection sensors depending on the sensing technologies: magnetometer, infrared, ultrasonic, and radar have seen the widest adoption.
We will keep this article as comprehensive for non-technical reader as possible but understanding some basic technical concepts should help you choose the right balance between price and performance. Take fitness trackers for example. They are basic ones you can buy for $30 but there are many models that sell for $500+. Order of magnitude price difference is mainly about heart rate sensor and step counter accuracy. If you need a simple reminder to get you to approximately 10,000 steps per day target $30 model may do. But if you are a fitness junkies or professional athlete you have to look under the hood!
Let’s take a closer technical look at vehicle detection sensors.
Magnetometers
The magnetometer is a sensor that measures magnetic field intensity and helps to understand the object’s orientation. Iron-containing objects, like cars, create a short-range distortion that can be measured. The magnitude of this distortion depends on the type of the ferrous alloy, the distance to the sensor and the size of the object.
As illustrated in the picture below, the deviations are much stronger around the engine and the wheels of a car.
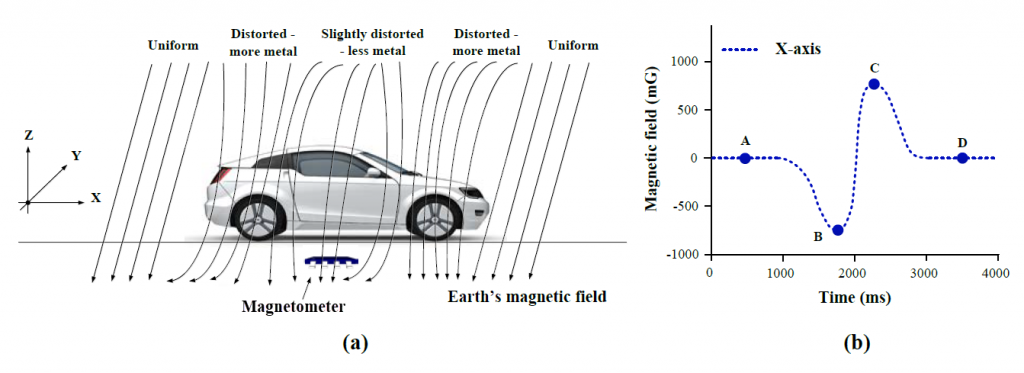
Given the variety of sensors able to detect magnetic field, the process initially seems to be a simple task: do a few experiments with thresholds detection, calibrate algorithms and the smart parking sensor is ready. However, things are not that simple. Different vehicles have different levels of magnetic field intensity, and even though two cars may look similar, one of them might have a much stronger magnetic field footprint. At the same time, each car has spots where the distortion is minimal (see the illustration above).
If we take battery-operated smart parking sensors, more advanced complex detection algorithms will result in more power consumption, higher sensor sampling rates and more compute time on the microprocessor. So one of the key disadvantages of magnetometer-based smart car parking sensors is rapidly decreasing battery life with the increasing accuracy requirements. Besides that, the modern electric vehicles often do not have ferromagnetic parts at all.
Nwave has an EV charging point customer who independently tested a few models of magnetometer-based sensors with all types of electric cars and results were disappointing – 60% vehicle detection accuracy instead of 95% – 98% advertised.
Infrared ranging sensors
These sensors are used in cameras, laptops, drones, and other applications that can detect objects and movement patterns.
There are two types of infrared (IR) ranging sensors:
- Reflected Intensity. They consist of an LED emitter and a photocell that measure the amount of light reflected by an object. The closer the object the stronger the reflected signal.
- Time-of-Flight (ToF). These sensors are based on the same principle but the difference is that they are built on more coherently operated laser system capable of measuring the time of reflected light travel (see the picture below).
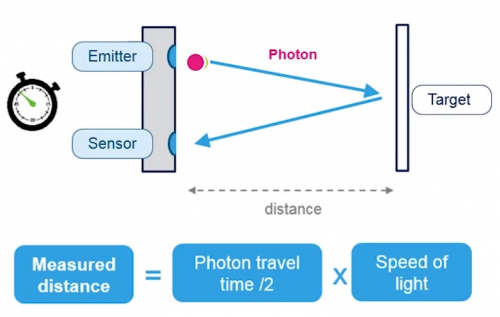
Obviously all types of cars reflect light well and it doesn’t make any difference whether it has a non-ferromagnetic electric motor or V8 engine. However, the ToF sensor has a significant advantage: since it measures an absolute distance the light has travelled, the results do not fluctuate with the object’s reflective properties. For instance, dust on the protective glass will not have a big effect on the result.
However, time of flight sensors have some drawbacks:
- approximately 3 times more expensive than magnetometers or reflected intensity;
- higher current drain: at 1Hz sampling rate it will run on typical D size battery approximately 5 years ;
- higher footprint 5x3mm which can be further increased for additional crosstalk compensation;
- it is sensitive to any optical obstruction and obviously road may not be as clean and tidy as the lab settings;
- a narrow emitted beam of light can be reflected in unpredictable ways as the bottom of the car is not flat.
Ultrasonic parking sensors
These sensors are based on the same ToF principle but the difference is that the emitter dispatches ultrasound waves instead of light. They are often used in parking assistance systems in cars: the sensors are fixed on bumpers and signals when you get close to an obstruction. The advantage of ToF ultrasonic sensors lies in the fact that due to the wider emitter beam, the measurement is more integral and less sensitive to unevenness of the bottom of the car.
Nevertheless, these sensors have some drawbacks. Firstly, they consume a lot of power.
Secondly, wider mechanical dimensions and higher current drain make it difficult to design a thin surface-mount sensor – casing has to accommodate a big emitter, a receiver, and a larger battery pack.
Thirdly, they don’t operate well under a cover plate – the emitter should have a view of the object. It works great for overhead sensor in garages but in the case of ground mounted parking sensor, there is a risk of mechanical damage to the ultrasonic sensing element.
Radar ranging sensors
Radars were initially used in air and naval defense systems and aviation. After smaller and more efficient radars were created, they were introduced to many other spheres.
Radars are based on the same ToF method but the difference is that the emitter dispatches radio waves instead of sound waves or photons. In general, radars have the same advantages and disadvantages as infrared ToF sensors however there are some differences:
- Radar ranging sensors that have a lower frequency and they can be less sensitive to some thin obstructions, e.g. they can be optimized to operate under thin snow cover.
- Radars have a wider beam and are less vulnerable to random reflection problems.
- These types of sensors are more expensive and may require special high-frequency circuit design knowledge.
- In radars, signal processing requires much more MCU horsepower (shorter battery life).
Sensor selection roundup
Just like quality fitness trackers using sensor fusion approach to achieve a reasonable balance of accuracy and power efficiency, the smart parking sensor in 2020 needs to rely on more than one sensing principle to resolve possible edge cases of each detection method.
Unless you live in the tropics, and your region has four seasons, a combination of a magnetometer and a radar is a practical choice. The radar can be substituted by infrared ToF sensors if you are not concerned about leaves, snow and other optical obstructions (see illustration below).
-

IR-based smart parking sensor -

Vehicle detection blocked
Hopefully this article helped you better understand the technologies used in various parking sensors. In order to make the right choice we would advise to do some real-life tests and ask vendors how they define and measure their advertised vehicle detection accuracy. Our earlier post on basic but highly important statistics fundamentals around object detections may help you immediately differentiate ambitious marketing claims from actually well measured and verified vehicle detection accuracy. If you have any questions or comments, please contact us and we will address them in our future posts.